圖片:
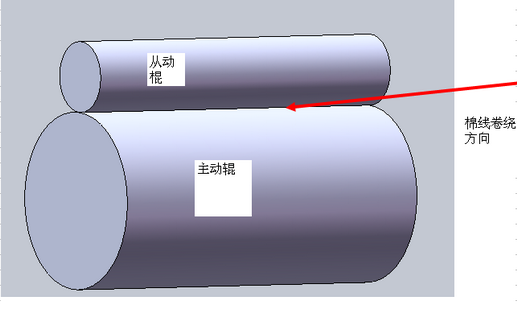
1:運動說明;主動輥由電機驅動,電機由變頻器進行調速。從動棍測裝有編碼器,以檢測從動棍的轉速。
2:主動輥上均勻纏繞棉絲。
3:控制要求:使從動棍的線速度保持一定(觸摸屏上設定的線速度)
由于主動輥上的棉線會越來越厚,為了保持從動棍的線速度為設定值。所以需要主動輥慢慢的減速。
現在的控制方法,由于主動輥的直徑,從動棍的直徑都是一定的,所以觸摸屏上的線速度可以轉換為主動輥的轉速從而得到變頻器所需要的HZ數。啟動設備后,在速度穩定一段時間后,開始用主動輥的命令值線速度減去 從動棍的反饋值的線速度,得到的值,如果主動輥大于從動棍(得到的值為正值),則主動輥的命令值減去的到的差值。如果主動輥線速度小于從動輥線速度(得到的值為負值)。則在主動輥的命令值上加上差值。
現在的出現的主要問題為。剛開始時一切正常,從動棍能保持觸摸屏上設定的線速度。但是到主動輥厚度很厚時(在設定時間的3/2時)主動輥的速度會出現震蕩(主動輥時快時慢,并且時快時慢的程度會越來越大。直到棉線扯斷)。
為了消除震蕩,在程序中加入了主動輥和從動輥差值的上下限(就是主動輥減去從動棍,正負的差值大于一定數值時,會輸入一個定數)。但是,這樣改了后,主動輥的速度會慢慢變大,直到棉線扯斷。于是又在設定時間的3/2時加入 上下限值。但是還是不能消除剛才的震蕩。
問題基本上就是這樣。請高手幫我分析一下到底是哪里的原因,如何把震蕩消除?
 滬公網安備31010802001143號
滬公網安備31010802001143號

