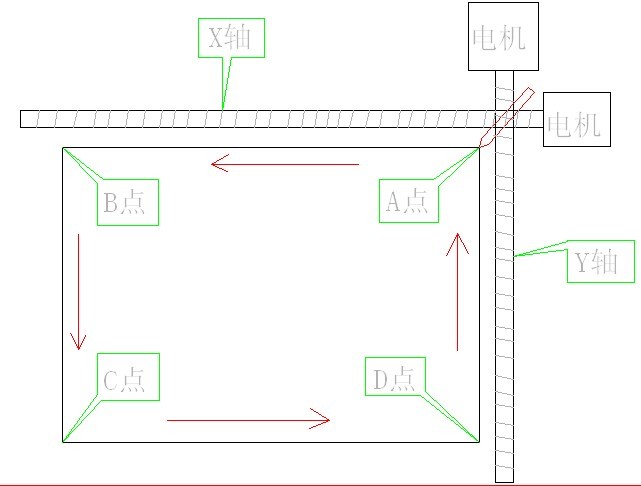
��λ�ώ���Һã�С��δ���|�^(gu��)�ŷ����F(xi��n)������һ�_(t��i)FX3UPLC���ƃɂ�(g��)ESϵ�У���J2ϵ�У��ŷ�����һ��(g��)�������^(gu��)���ǣ�?ji��n)��?d��ng)��X�S늙C(j��)���D(zhu��n)�Ƅ�(d��ng)������A�c(di��n)��ԭ�c(di��n)����B�c(di��n)��ֹͣ���˕r(sh��)Y�S늙C(j��)���D(zhu��n)�����Ƅ�(d��ng)������B�c(di��n)��C�c(di��n)ֹͣ���˕r(sh��)X�S�������D(zhu��n)�Ƅ�(d��ng)������C�c(di��n)��D�c(di��n)��ֹͣ���˕r(sh��)Y�S늙C(j��)�������D(zhu��n)�Ƅ�(d��ng)������D�c(di��n)��A�c(di��n)��ֹͣ��������ɡ������^(gu��)���У����κ�һ��(g��)�ط������ԕ�ͣ��������(d��ng)���ֿɏ�ԭ��ͣ�c(di��n)����(d��ng)�^�m(x��)�����������^��(du��)��һ��(g��)�L(zh��ng)���λ������Σ��F(xi��n)���ғ�(d��n)�ĵ��ǹ�����κ��(hu��)�a(ch��n)���۷e�`���������ÿ�ι�����ɺ�����(hu��)�ص�Aԭ�c(di��n)����ʲôָ����ã�������ܽo��(g��)ԓָ��Ę����������ýӽ��_�P(gu��n)�M(j��n)�ж�λ��C(j��)е��λ�����`��̫���`�����ֻ���S0.2��(g��)���ף�ϣ����λ�ώ�ָ��(d��o)ָ��(d��o)���x�x��
[ ���������X�_��2012-05-05 20:30���¾� ]
 �����W(w��ng)����31010802001143̖(h��o)
�����W(w��ng)����31010802001143̖(h��o)

