圖片:
圖片:
圖片:

圖片:
圖片:
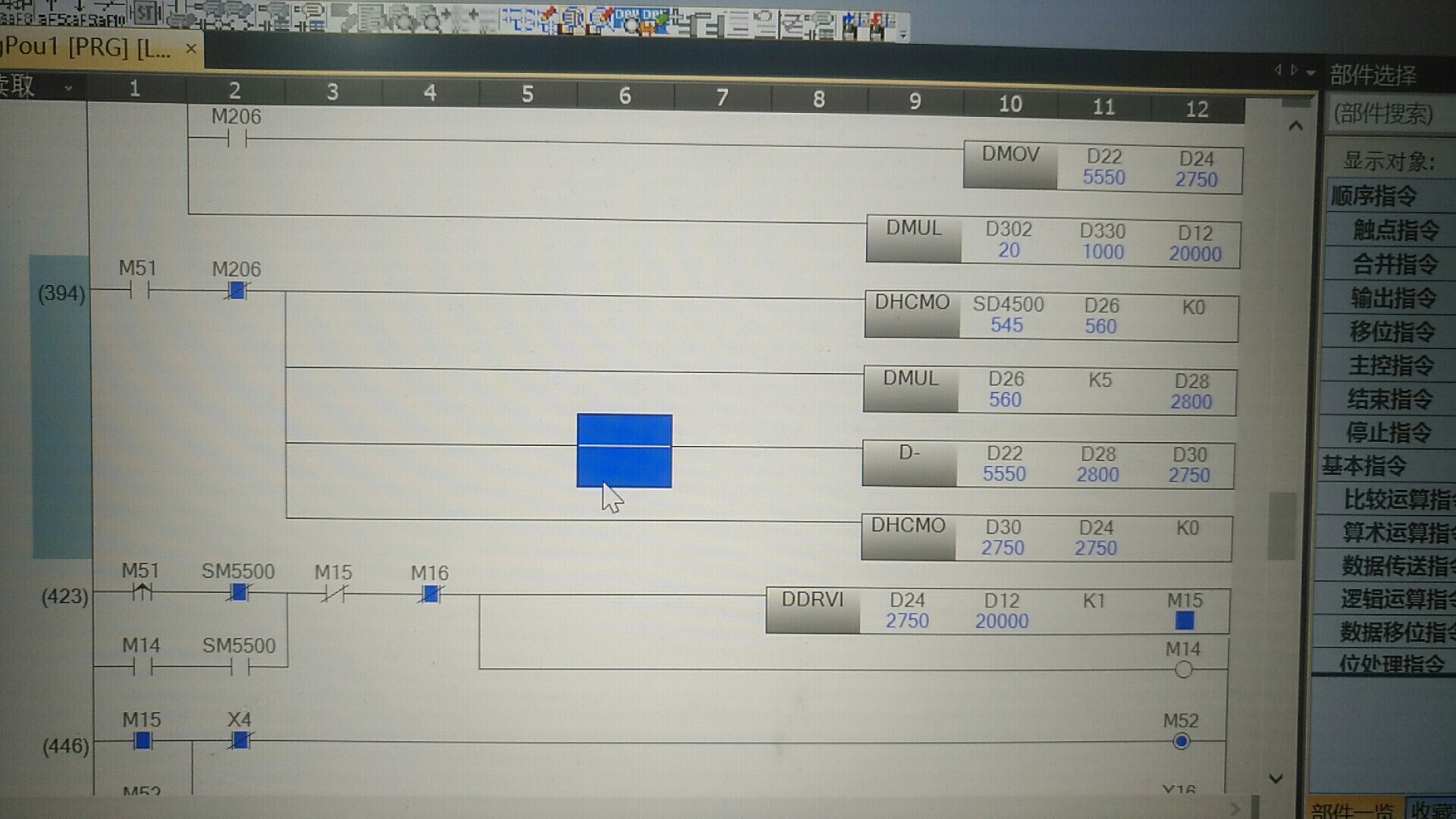
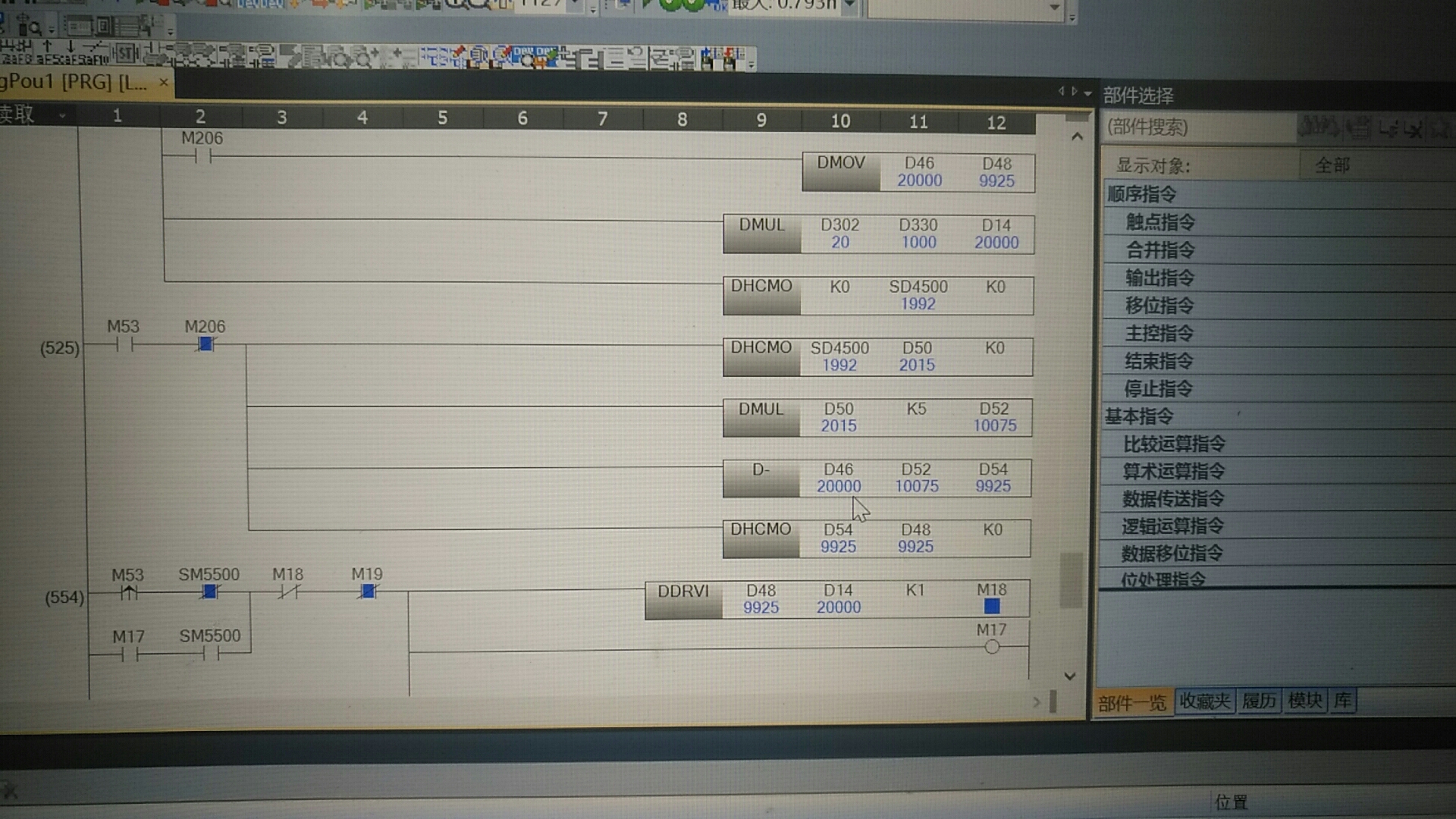
各位大神,有誰搞過三菱FX5U的PLC,送料機(jī)構(gòu),相對(duì)定位,用外接編碼器時(shí)時(shí)修正做全閉環(huán)的。
這次被400的技術(shù)支持坑了一把,之前電話咨詢怎么做全閉環(huán),幾個(gè)人都說fx5u可以做,可以時(shí)時(shí)修改定位當(dāng)前地址,實(shí)際我做了才發(fā)現(xiàn)不能時(shí)時(shí)寫入,做一半就停了,連中斷寫入都試了也不行,DHCMov也不行,能想的辦法都想過了。實(shí)在沒招了只能搞個(gè)下三濫的高速計(jì)數(shù)置位停止脈沖輸出。但是這個(gè)方法不是最優(yōu)解決方法。誤差比較大。
所以請大神幫忙看看,有沒有解決之道。很急,謝謝。
上圖
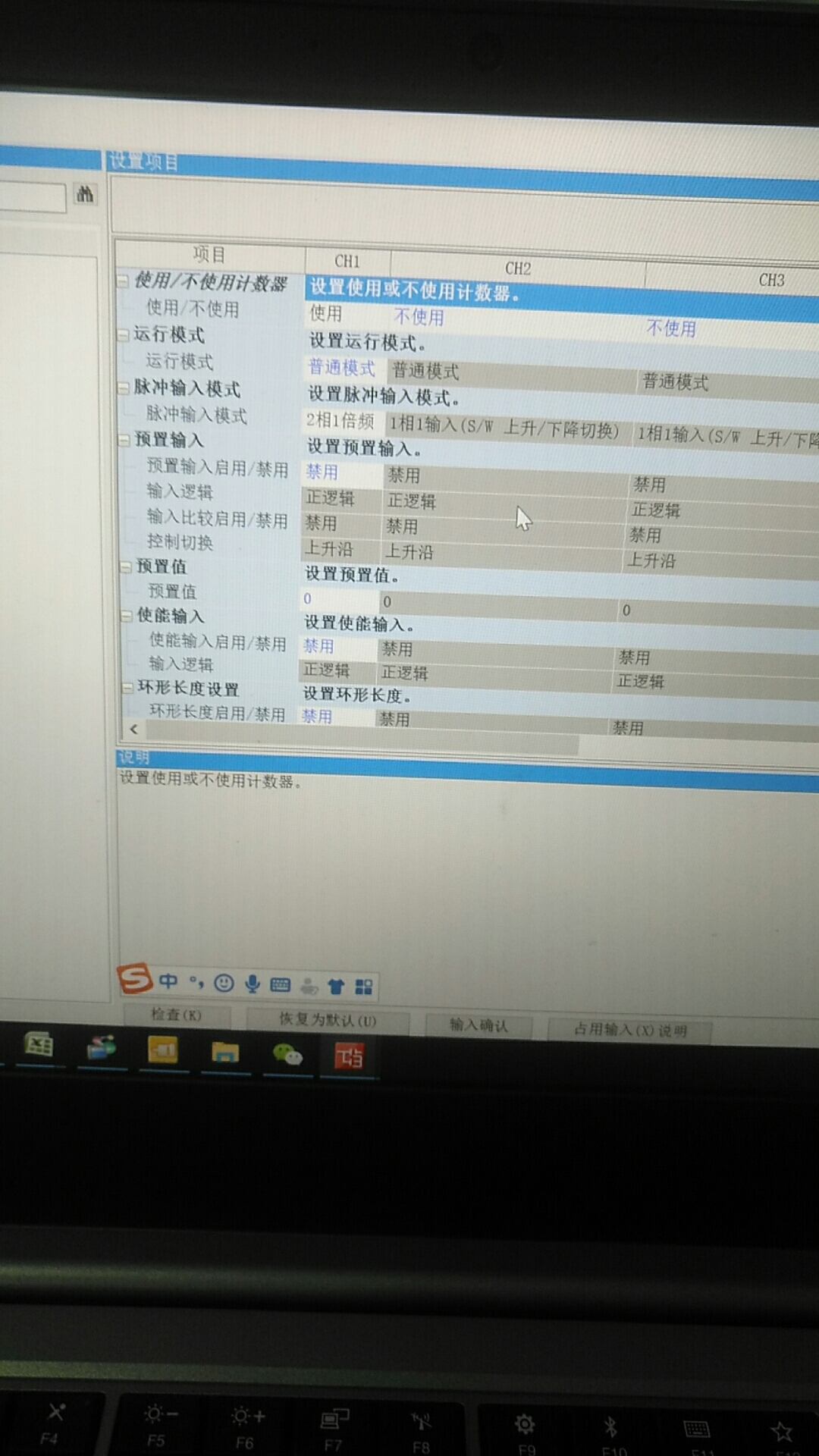
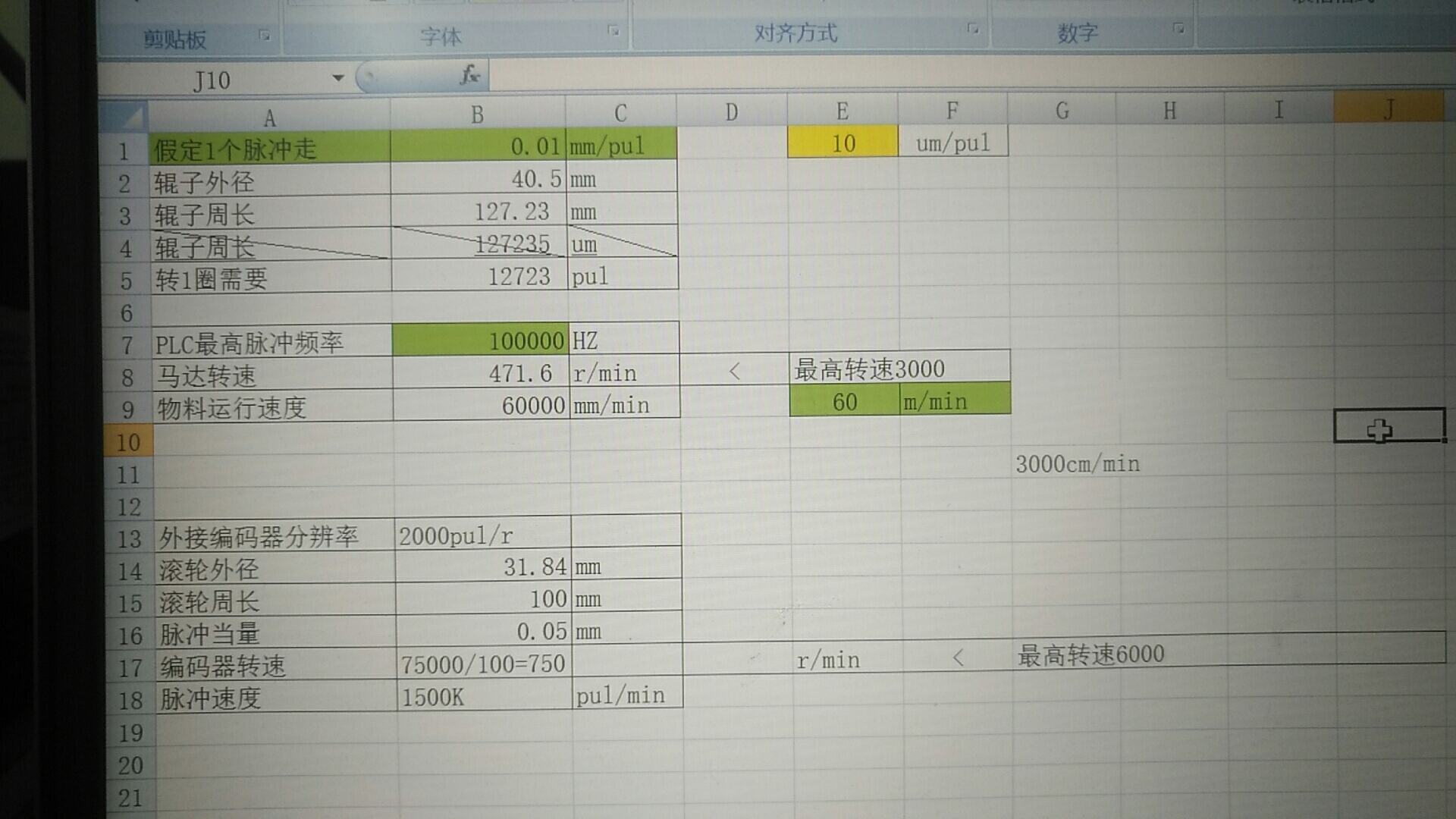
忘了說我參數(shù),伺服用的mR-JE-A準(zhǔn)備做其他用途,臨時(shí)用作位置模式,如果RJ就簡單多了。編碼器2000p的,
 滬公網(wǎng)安備31010802001143號(hào)
滬公網(wǎng)安備31010802001143號(hào)

