圖片:
圖片:

圖片:
圖片:
圖片:
圖片:
圖片:
圖片:

圖片:
視覺龍從視覺方案設(shè)計到定制整體解決方案,為各行業(yè)提供質(zhì)量穩(wěn)定、安可行的生產(chǎn)方式,幫助企業(yè)有效降低實施成本,提高生產(chǎn)效率和生產(chǎn)質(zhì)量。視覺龍為智能制造行業(yè)客戶提供數(shù)字化、網(wǎng)絡(luò)化、智能化的機(jī)器視覺產(chǎn)品和服務(wù)。
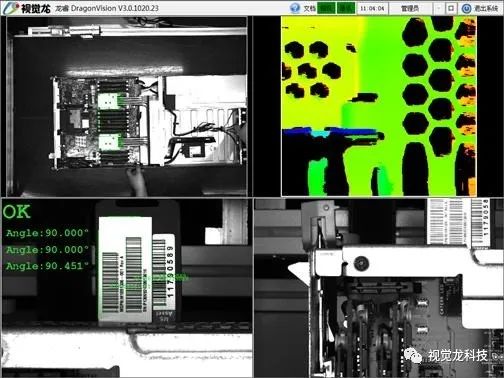
01 服務(wù)器內(nèi)觀和外觀柔性檢測
采用“龍睿旗艦型”的2D和3D視覺檢測技術(shù),由2個機(jī)械手分別攜帶2D相機(jī)和3D傳感器,對服務(wù)器的內(nèi)觀和外觀進(jìn)行檢測。檢測標(biāo)簽是否粘貼、對齊、破損,插接件類如內(nèi)存卡、卡勾扣檢測,墊片的安裝檢測,螺絲的有無,擰花檢測,掃碼追溯查詢等。檢測漏檢率0%,檢測過檢率<1%,設(shè)備故障率<0.2%。
02 手機(jī)AOI檢測
采用“龍睿旗艦型”的視覺檢測技術(shù),檢測手機(jī)內(nèi)部零件的變形、外露、偏移、未組裝到位、螺絲未鎖、螺絲浮高等。
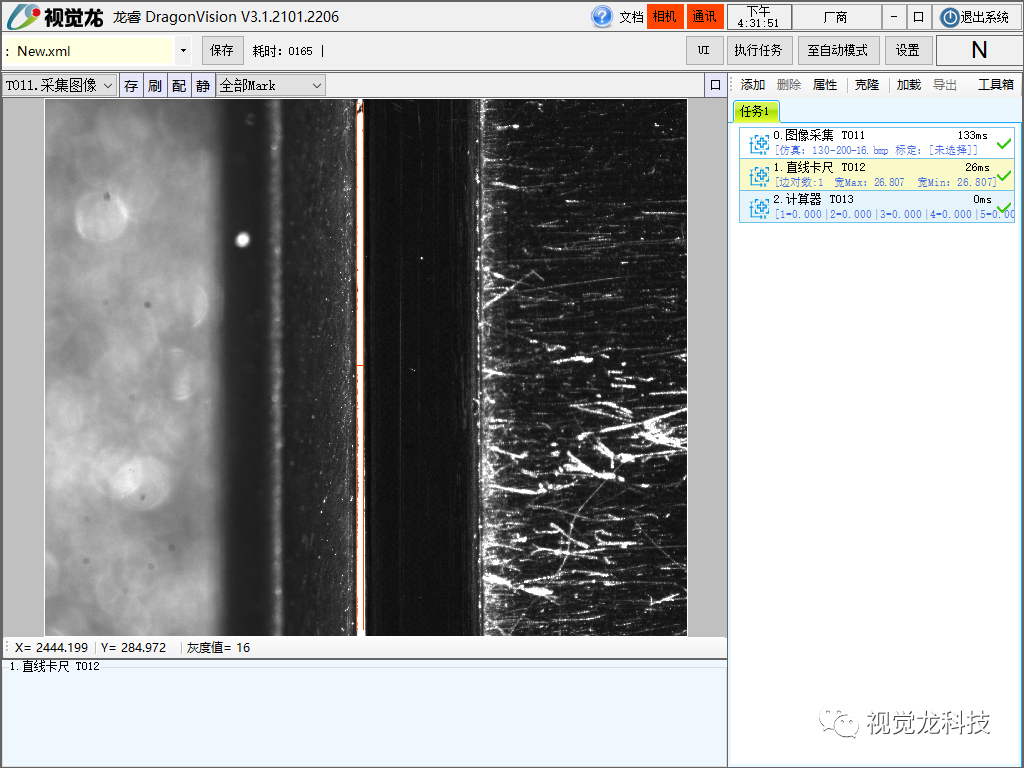
03 手機(jī)屏幕組裝間隙檢測
采用“龍睿標(biāo)準(zhǔn)型”的視覺檢測技術(shù),對TP組裝到中框后進(jìn)行間隙檢測,單邊間隙0.75mm±0.01mm。
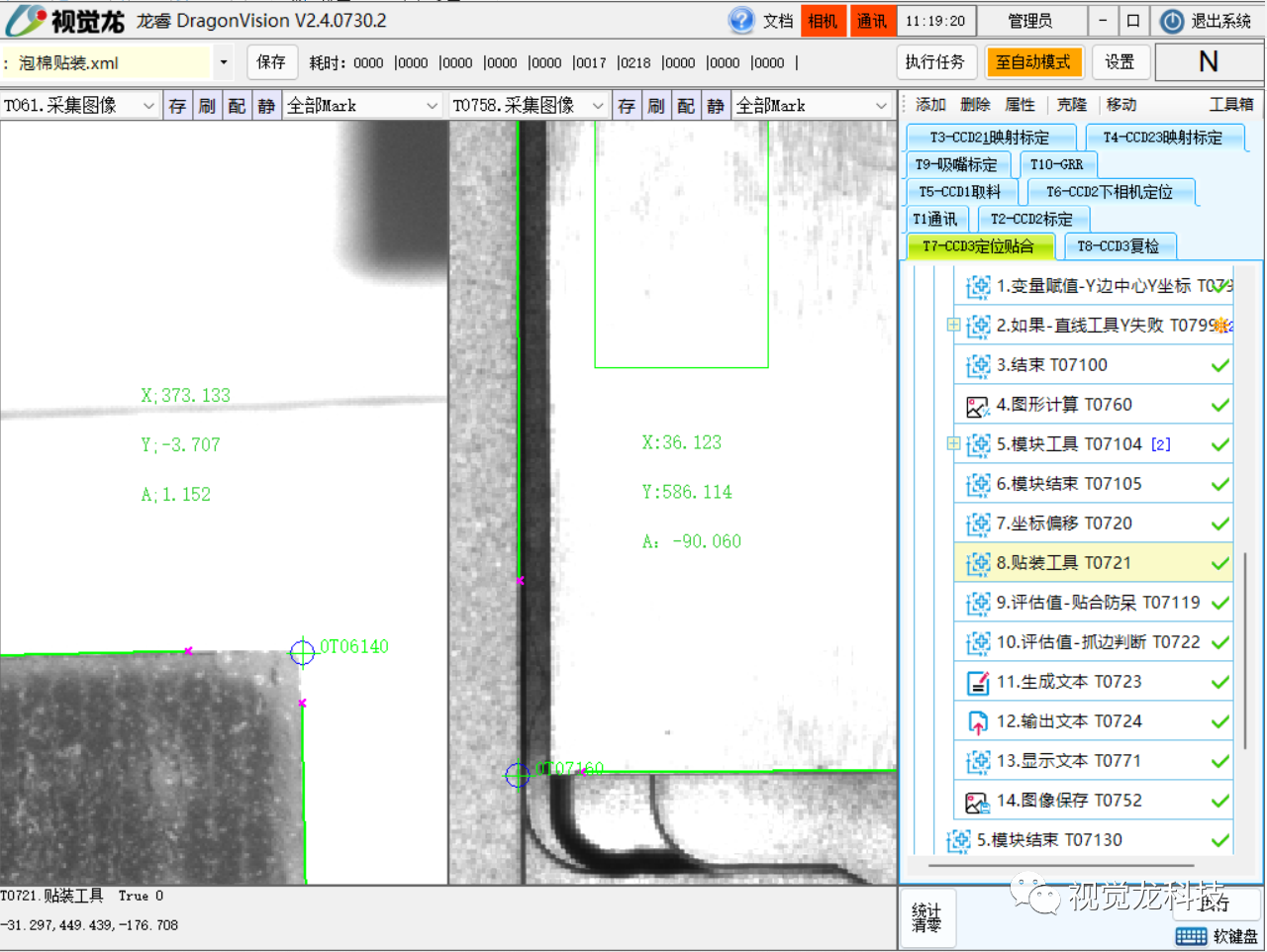
04 智能手表輔料貼合
采用“龍睿型”的視覺對位貼合和飛拍技術(shù),通過多工位多相機(jī)分別對產(chǎn)品的不同區(qū)域元件進(jìn)行定位,同時對輔料進(jìn)行位置識別,從而引導(dǎo)機(jī)械手/模組進(jìn)行輔料貼合與復(fù)檢。
05 筆電輔料貼合
采用“龍睿型”對位貼合技術(shù),首先機(jī)械手固定位置吸取輔料,移動到下相機(jī)對輔料進(jìn)行精定位,視覺計算出輔料對位貼合的中心點(diǎn)。隨后機(jī)械手再帶著上相機(jī)移動到產(chǎn)品拍照位,對產(chǎn)品進(jìn)行精定位,視覺計算出產(chǎn)品對位貼合的中心點(diǎn),寫入貼裝工具即可。相機(jī)重復(fù)性精度0.02mm,貼合精度±0.15mm。
06 筆電分類激光打標(biāo)
采用“龍睿型”的視覺定位技術(shù),對筆電C件的型號進(jìn)行定位識別,然后視覺將坐標(biāo)信息與產(chǎn)品型號發(fā)送給PLC,引導(dǎo)機(jī)械手進(jìn)行上料和激光打標(biāo)。
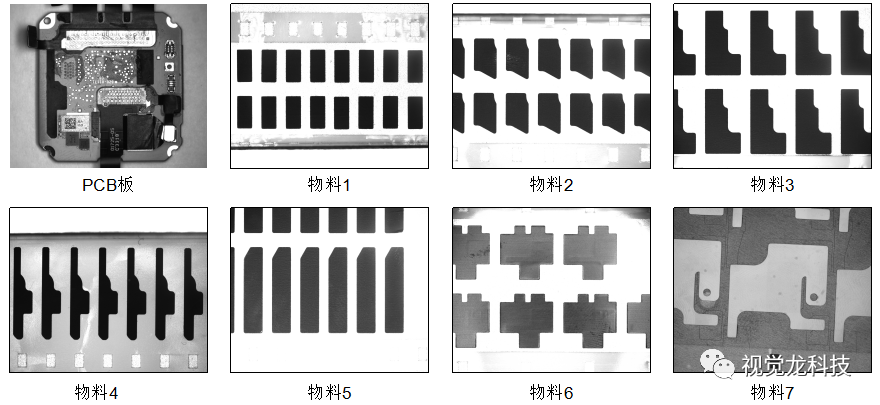
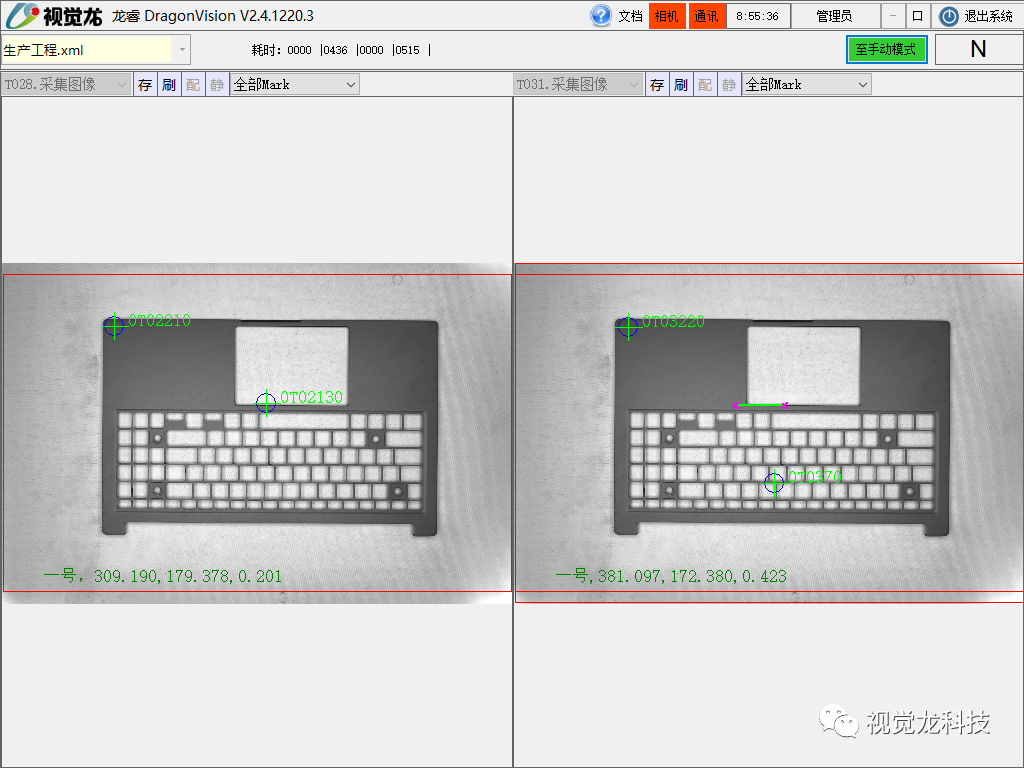
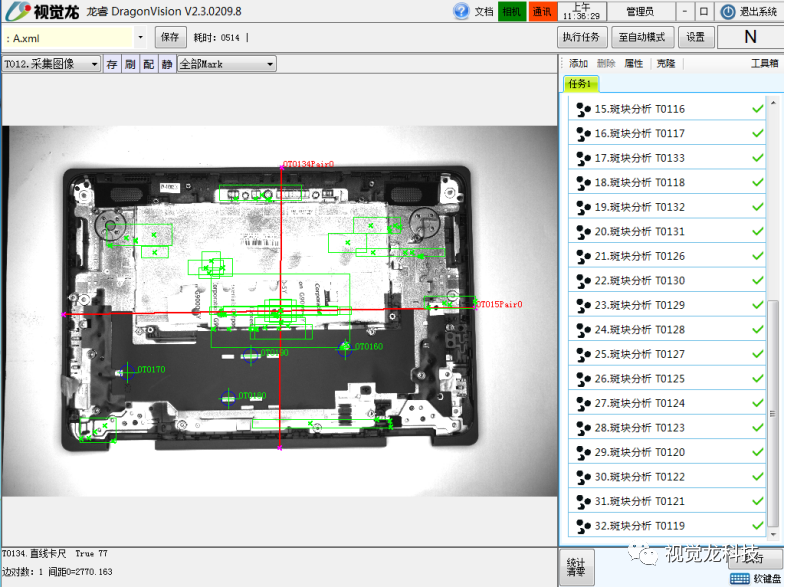
07 筆電ACD鍵內(nèi)觀檢測
采用“龍睿標(biāo)準(zhǔn)型”的視覺檢測技術(shù),可以兼容多種型號的ACD面板進(jìn)行一次性檢測。檢測物料有無貼片、塑膠件、螺柱、鈑金件、標(biāo)簽貼紙、泡棉等。檢測精度<0.1mm。
08 藍(lán)牙耳機(jī)盒視覺定位組裝
采用“龍睿型”的視覺定位技術(shù),工位1定位產(chǎn)品中間十字后,引導(dǎo)機(jī)械手進(jìn)行多位置組裝。工位2對產(chǎn)品中間輪廓進(jìn)行定位后,引導(dǎo)機(jī)械手多位置組裝。工位3對產(chǎn)品中間孔與橢圓進(jìn)行定位后,引導(dǎo)機(jī)械手進(jìn)行組裝。定位精度0.03mm。
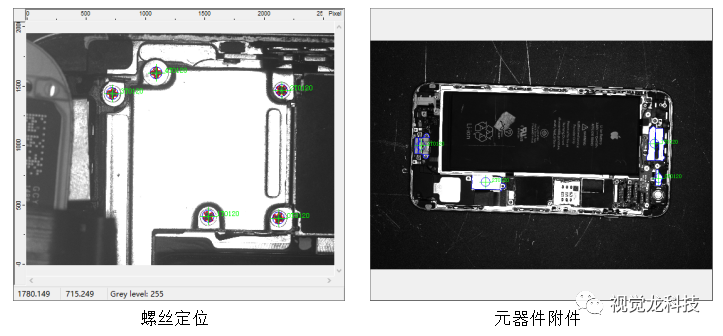
09 手機(jī)螺絲與元件定位復(fù)檢
采用“龍睿標(biāo)準(zhǔn)型”的視覺定位和檢測技術(shù),首先對手機(jī)中框螺絲與內(nèi)部元件定位,實現(xiàn)螺絲和各類元件拆除。再對拆除后的區(qū)域進(jìn)行復(fù)檢,判定有無拆除完整。螺絲定位精度±0.05mm,金屬蓋板定位精度±0.1mm。
10 無線充線圈定位打碼
采用“龍睿型”的視覺定位技術(shù),對無線充的線圈視覺定位輪廓,輸出坐標(biāo)給激光進(jìn)行打碼,定位精度0.1mm。
 滬公網(wǎng)安備31010802001143號
滬公網(wǎng)安備31010802001143號

